Integrals
Integration is the inverse process of
differentiation. In the differential calculus, we are given a function and we
have to find the derivative or differential of this function, but in the
integral calculus, we are to find a function whose differential is given. Thus,
integration is a process which is the inverse of differentiation.
Then, ∫f(x) dx = F(x) + C,
these integrals are called indefinite integrals or general integrals. C is an
arbitrary constant by varying which one gets different anti-derivatives of the
given function.
Note: Derivative of a function is
unique but a function can have infinite anti-derivatives or integrals.
Properties of Indefinite Integral
(i)
∫[f(x) + g(x)] dx = ∫f(x) dx + ∫g(x) dx
(ii) For any real number k, ∫k f(x) dx = k∫f(x)dx.
(iii) In general, if f1, f2,………, fn are
functions and k1, k2,…, kn are
real numbers, then
∫[k1f1(x) + k2 f2(x)+…+ knfn(x)] dx = k1 ∫f1(x)
dx + k2 ∫ f2(x) dx+…+ kn ∫fn(x) dx
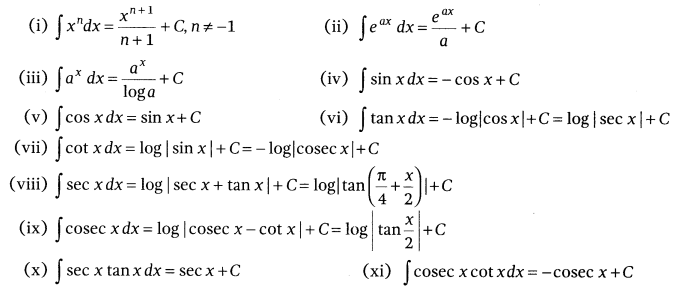
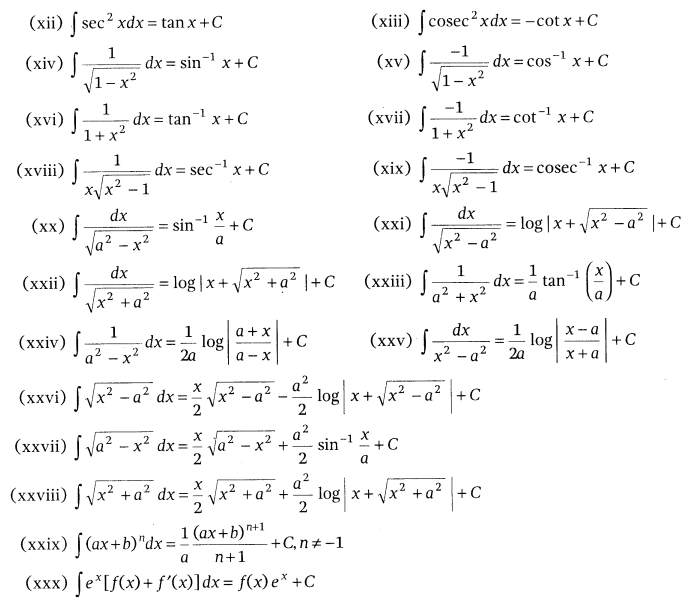
Basic Formulae
Integration using Trigonometric
Identities
When the integrand involves some
trigonometric functions, we use the following identities to find the integral:
·
2 sin A . cos B = sin( A + B) + sin( A – B)
·
2 cos A . sin B = sin( A + B) – sin( A – B)
·
2 cos A . cos B = cos (A + B) + cos(A – B)
·
2 sin A . sin B = cos(A – B) – cos (A + B)
·
2 sin A
cos A = sin 2A
·
cos2 A
– sin2 A = cos 2A
·
sin2 A
= (![]() )
)
·
sin2 A
+ cos2 A = 1
·
![]()
·
![]()
Integration by Substitutions
Substitution method is used, when a
suitable substitution of variable leads to simplification of integral.
If I = ∫f(x)dx, then by putting x = g(z), we get
I = ∫ f[g(z)] g'(z) dz
Note: Try to substitute the variable whose derivative is present in the
original integral and final integral must be written in terms of the original
variable of integration.
Integration by Parts
For a given functions f(x) and q(x),
we have
∫[f(x) q(x)] dx = f(x)∫g(x)dx – ∫{f'(x) ∫g(x)dx} dx
Here, we can choose the first function according to its position in ILATE,
where
I = Inverse trigonometric function
L = Logarithmic function
A = Algebraic function
T = Trigonometric function
E = Exponential function
[the function which comes first in ILATE should taken as first junction and other as second function]
Note
(i) Keep in mind, ILATE is not a rule as all
questions of integration by parts cannot be done by above method.
(ii) It is worth mentioning that integration by parts is not applicable to
product of functions in all cases. For instance, the method does not work for
∫√x sinx dx. The reason is that there
does not exist any function whose derivative is √x sinx.
(iii) Observe that while finding the integral of the second function, we did
not add any constant of integration.
Integration by Partial Fractions
A rational function is ratio of two polynomials of the form ![]() ,
where p(x) and q(x) are polynomials in x and q(x) ≠ 0. If degree of p(x)
> degree of q(x), then we may divide p(x) by q(x) so that
,
where p(x) and q(x) are polynomials in x and q(x) ≠ 0. If degree of p(x)
> degree of q(x), then we may divide p(x) by q(x) so that ![]() ,
where t(x) is a polynomial in x which can be integrated easily and degree of
p1(x) is less than the degree of q(x) .
,
where t(x) is a polynomial in x which can be integrated easily and degree of
p1(x) is less than the degree of q(x) . ![]() can be integrated by expressing
can be integrated by expressing ![]() as
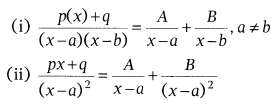
the sum of partial fractions of the following type:
as
the sum of partial fractions of the following type:
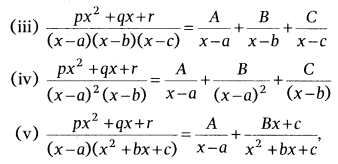
where x2 + bx + c cannot be
factorised further.
Integrals of the types  can be transformed into
standard form by expressing
can be transformed into
standard form by expressing 
Integrals of the types  can be transformed into
standard form by expressing px + q = A
can be transformed into
standard form by expressing px + q = A ![]() (ax2 +
bx + c) + B = A(2ax + b) +
B, where A and B are determined by comparing coefficients on both sides.
(ax2 +
bx + c) + B = A(2ax + b) +
B, where A and B are determined by comparing coefficients on both sides.