Applications
Of Matrices And Determinants
In this chapter, we present some applications of
matrices in solving system of linear equations. To be specific, we study four
methods, namely
i)Matrix
inversion method,
(ii) Cramer’s rule
(iii)
Gaussian elimination method, and
(iv) Rank method.
Before
knowing these methods, we introduce the following:
(i)
Inverse of a non-singular square Inverse of a Matrix
The
multiplicative inverse of a square matrix is called its inverse matrix. If a
matrix AA has an inverse, then AA is said to be nonsingular or
invertible. A singular matrix does not have an inverse.
To find the inverse of a square matrix AA , you need to find a
matrix A−1A−1 such that the product
of AA and A−1A−1 is the identity matrix.
In other words, for every square
matrix AA which is nonsingular there exist an inverse matrix, with
the property that, AA−1=A−1A=IAA−1=A−1A=I , where II is the identity matrix of the
appropriate size.
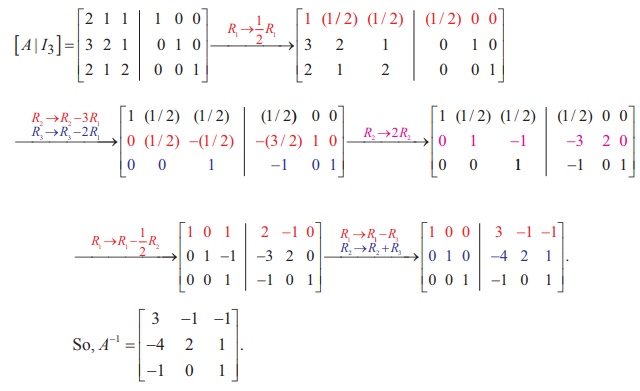
Method 1:
Let AA be an n×n matrix.
Write the doubly augmented
matrix [A | In] .
Apply elementary row operations to write
the matrix in reduced row-echelon form.
Decide whether the matrix A is
invertible (nonsingular).
If A can be reduced to the
identity matrix In ,
then A−1 is the matrix on the right of the transformed augmented
matrix.
If A cannot be reduced to the
identity matrix, then A is singular.
Method 2:
You may use the following formula when
finding the inverse of n×n matrix.
If A is non-singular matrix,
there exists an inverse which is given by ,
where | A || A | is the determinant of the
matrix.
The Classical Adjoin of a Square Matrix :
Let A = [ a ij ]
be a square matrix. The transpose of the matrix whose ( i, j) entry is
the a ij cofactor is called the
classical adjoint of A:
![]()
Example 1:
Find the adjoint of
the matrix

Solution:
The first step is to evaluate the cofactor of
every entry:

Therefore,
![]()
Why form the adjoint
matrix?
First, verify the following calculation where
the matrix A above is multiplied by its adjoint:
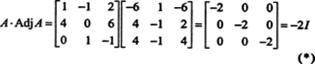 ----------------------------------(*)
----------------------------------(*)
Now, since a Laplace expansion by the first column of A gives

equation
(*) becomes
![]()
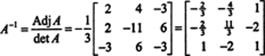
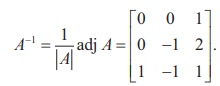
This result gives the following equation for
the inverse of A:
![]()
Example 2:
Determine the inverse of the following matrix
by first computing its adjoin:

Solution:
First, evaluate the cofactor of each entry
in A:

These computations imply that

Now, since Laplace expansion along the first
row gives

the
inverse of A is
which
may be verified by checking that AA −1 = A −1 A = I.
Example 3:
If A is an invertible n by n matrix, compute the
determinant of Adj A in terms of det A.
Solution:
Because A is invertible, the
equation A −1 =
Adj A/det A implies
![]()
Recall that if B is n x n and k is a scalar,
then det( kB) = k n det B. Applying this formula with k = det A and B = A −1 gives
![]()
Thus,
![]()
Example 4:
Show that the adjoin
of the adjoin of A is
guaranteed to equal A if A is an invertible 2 by 2
matrix, but not if A is
an invertible square matrix of higher order.
Solution:
First, the equation A · Adj A = (det A) I can be
rewritten
![]()
which
implies
![]()
Next, the equation A · Adj A = (det A) I also implies
![]()
This expression, along with the result of
Example 3, transforms (*) into
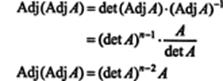
where n is the size
of the square matrix A. If n = 2, then (det A) n−2 =
(det A) 0 = 1—since det A ≠ 0—which implies Adj
(Adj A) = A, as desired. However, if n > 2, then
(det A) n−2 will not equal 1 for
every nonzero value of det A, so Adj (Adj A) will not
necessarily equal A.
Yet this proof does show that whatever the size of the matrix, Adj (Adj A) will equal A if
det A = 1.
The relation between adjoint
and inverse of a matrix :
To find the inverse of a matrix A, i.e A-1 we shall first define the adjoint of a matrix. Let
A be an n x n matrix. The (i,j)
cofactor of A is defined to be
Aij =
(-1)ij det(Mij),
where
Mij is the (i,j)th minor matrix obtained from A after
removing the ith row and jth
column. Let’s consider the n x n matrix A = (Aij) and
define the n x n matrix Adj(A) = AT. The matrix Adj(A) is called the adjoint of matrix A. When A is invertible, then its
inverse can be obtained by the formula given below.
The inverse is defined only for non-singular
square matrices. The following relationship holds between a matrix and its
inverse:
AA-1 = A-1A = I,
where I is the identity matrix
Theorems On Ad joint And Inverse Of A Matrix
Theorem 1
If A be any given square matrix of order n,
then A adj(A)
= adj(A) A = |A|I, where I is the identitiy
matrix of order n.
Proof:
Let

Since the sum of the product of elements of a
row (or a column) with corresponding cofactors is equal to |A| and otherwise
zero, we have
Similarly, we can show that adj(A) A
= |A| I
Hence, A adj(A) = adj(A)
A
Theorem 2
If A and B are
non-singular matrices of the same order, then AB and BA are also non-singular
matrices of the same order.
Theorem 3
The determinant of the product matrices is
equal to the product of their respective determinants, that is, |AB| = |A||B|,
where A and B are square matrices of the same order.
Remark:
We know that
Writing determinants of matrices on both
sides, we have
i.e,
i.e,
|adj(A)|
|A| = |A|3
or |adj(A)| = |A|2
In general, if A is a quare
matrix of order n, then |adj(A)| = |A|n-1.
Theorem 4
A square matrix A is invertible if and only
if A is a non-singular matrix.
Proof:
Let A be an
invertible matrix of order n and I be the identity matrix of the same order.
Then there exists a square matrix B of order n such that AB = BA = I. Now, AB =
I.
So |A| |B| = |I| = 1 (since |I| = 1 and |AB|
= |A| |B|). This gives |A| to be a non-zero value. Hence A is a non-singular
matrix. Conversely, let A be a non-singular matrix, then |A| is non-zero. Now A
adj(A)
= adj(A) A = |A| I (Theorem 1). Or,

or AB = BA
= I, where
Thus A is invertible and
Creating the Adjugate Matrix to Find
the Inverse Matrix:
![]()
Properties
of Inverse Matrices:
If A is
nonsingular, then so is A -1 and (A -1) -1 = A
If A and
B are nonsingular matrices, then AB is nonsingular and (AB) -1 = B-1 A -1
If A is
nonsingular then (AT)-1 = (A-1)T
If A and B are
matrices with AB=In then A and B are
inverses of each other.
Notice
that the fourth property implies that if AB = I then BA = I
Let A, A1 and A2 be n×n matrices, the following statements are true:
1. If A-1 = B, then A (col
k of B) = ek
2. If A has an inverse matrix, then there is only one inverse
matrix.
3. If A1 and A2 have
inverses, then A1 A2 has an inverse
and (A1 A2)-1 = A1-1 A2-1
4. If A has an inverse, then x = A-1d is
the solution of Ax = d and this is the only solution.
5. The following are equivalent:
(i) A has an inverse.
(ii) det (A) is
not zero.
(iii) Ax = 0 implies x = 0.
If c is any non-zero scalar then cA is
invertible and (cA)-1 = A-1/c.
For n = 0, 1, 2…, An is invertible and (An)-1 =
A-n = (A-1)n.
If A is a square matrix and n > 0 then:
A-n = (A-1)n
Example 1:
Compute A-3 for the matrix:

Solution:
First of all, we
need to find the inverse of the given matrix. The method to find the inverse is
only applicable for 2 × 2 matrices.
Steps are as follows:
[1] Interchange leading diagonal elements:
-7 → 2
2 → -7

[2] Change signs of the other 2 elements:
-3 → 3
4 → -4

[3] Find the determinant |A|

[4] Multiply result of [2] by 1/|A|
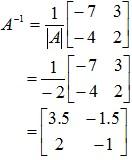
Now:

Example 2:
Given the matrix A verify
that the indicated matrix is in fact the inverse.
Solution:

To verify that we do in fact have the inverse we’ll need to check the condition
AA-1 = A-1A = I
Now we check whether AA-1 = A-1A = I:
Hence the required is verified.
Example 3:
Let A be the 2 × 2
matrix,

Show that A has no inverse.
Solution:
An inverse for A must be a 2
× 2 matrix.
Let  such
that AB = BA = I. If such a matrix B exists, it
must satisfy the following equation:
such
that AB = BA = I. If such a matrix B exists, it
must satisfy the following equation:

The preceding equation requires that:
a + 2c = 1 and 3a + 6c = 0
which is clearly impossible, so we can conclude that A has no inverse.
Left cancellation property
& the right cancellation property :
In mathematics, the notion of cancellative is
a generalization of the notion of invertible.
![]() An element a in a magma (M, ∗) has
the left cancellation property (or
is left-cancellative) if for all b and c in M, a ∗ b = a ∗ c always
implies that b = c.
An element a in a magma (M, ∗) has
the left cancellation property (or
is left-cancellative) if for all b and c in M, a ∗ b = a ∗ c always
implies that b = c.
![]() An element a in
a magma (M, ∗) has
the right cancellation property (or
is right-cancellative) if for all b and c in M, b ∗ a = c ∗ a always implies
that b = c.
An element a in
a magma (M, ∗) has
the right cancellation property (or
is right-cancellative) if for all b and c in M, b ∗ a = c ∗ a always implies
that b = c.
![]() An element a in
a magma (M, ∗) has
the two-sided cancellation property (or
is cancellative) if it is both left- and right-cancellative.
An element a in
a magma (M, ∗) has
the two-sided cancellation property (or
is cancellative) if it is both left- and right-cancellative.
![]() A magma (M,
∗) has
the left cancellation property (or is left-cancellative) if all a in
the magma are left cancellative, and similar definitions apply for the right
cancellative or two-sided cancellative properties.
A magma (M,
∗) has
the left cancellation property (or is left-cancellative) if all a in
the magma are left cancellative, and similar definitions apply for the right
cancellative or two-sided cancellative properties.
![]() A left-invertible element is
left-cancellative, and analogously for right and two-sided.
A left-invertible element is
left-cancellative, and analogously for right and two-sided.
Application of matrices to
geometry :
There
is a special type of non-singular matrices which are widely used in
applications of matrices to geometry. For simplicity, we consider
two-dimensional analytical geometry.
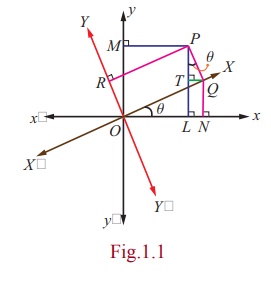
Let O be the
origin, and x 'O x and y 'Oy be
the x -axis and y -axis. Let P be
a point in the plane whose coordinates are (x, y) with
respect to the coordinate system. Suppose that we rotate the x -axis and
y -axis about the origin, through an angle θ as shown in the figure. Let X 'OX and Y 'OY be
the new X -axis and new Y -axis. Let ( X ,Y ) be the
new set of coordinates of P with respect to the new
coordinate system. Referring to Fig.1.1,
we get
x
= OL = ON − LN = X cos θ – QT = X cos
θ − Y sin θ ,
y
= PL = PT + TL = QN + PT = X sin θ + Y cos
θ .
These equations provide transformation
of one coordinate system into another coordinate system.
The above two equations can be written
in the matrix form
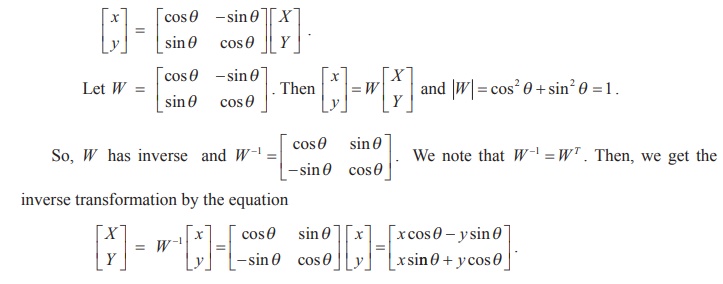
Hence, we get the transformation X = x cosθ - y sinθ , Y = x sinθ + y cosθ .
This transformation is used in Computer Graphics and determined by the
matrix 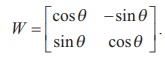
We note that the matrix W satisfies
a special property W -1 = WT ; that is, WW T = WTW =I
Definition 1.3
A
square matrix A is called orthogonal if AAT = ATA = I.
Note
A is orthogonal if and only if A is
non-singular and A−1 = AT .
Example
1.11
Prove
that  is orthogonal.
is orthogonal.
Solution
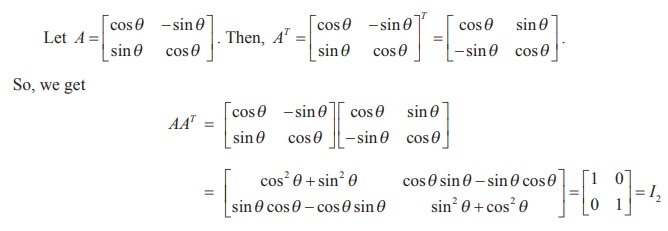
Similarly,
we get ATA = I2 . Hence AAT =
ATA = I2 ⇒ A is orthogonal.
Application of matrices to Cryptography :
One of the important applications of inverse of a
non-singular square matrix is in cryptography. Cryptography is an art of
communication between two people by keeping the information not known to
others. It is based upon two factors, namely encryption and decryption. Encryption means the process of
transformation of an information (plain form) into an unreadable form (coded
form). On the other hand, Decryption means the transformation of the coded message back into original form.
Encryption and decryption require a secret technique which is known only to the
sender and the receiver.

This secret is called a key. One way of generating a key is by using a non-singular matrix
to encrypt a message by the sender. The receiver decodes (decrypts) the message
to retrieve the original message by using the inverse of the matrix. The matrix
used for encryption is called encryption matrix (encoding matrix) and that used for decoding is called decryption matrix (decoding matrix).
We
explain the process of encryption and decryption by means of an example.
Suppose
that the sender and receiver consider messages in alphabets A − Z only, both assign the numbers 1-26 to the
letters A − Z respectively, and the number 0 to a blank
space. For simplicity, the sender employs a key as post-multiplication by a
non-singular matrix of order 3 of his own choice. The receiver uses post-multiplication
by the inverse of the matrix which has been chosen by the sender.
Let
the encoding matrix be
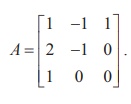
Let
the message to be sent by the sender be “WELCOME”.
Since
the key is taken as the operation of post-multiplication by a square matrix of
order 3, the message is cut into pieces (WEL), (COM), (E), each of length 3, and
converted into a sequence of row matrices of numbers:
[23 5 12],[3 15 13],[5 0 0].
Note
that, we have included two zeros in the last row matrix. The reason is to get a
row matrix with 5 as the first entry.
Next,
we encode the message by post-multiplying each row matrix as given below:
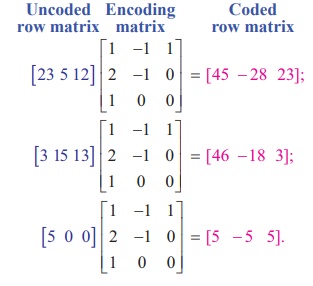
So
the encoded message is [45 − 28 −23] [46 -18 3] [
5 −5 5]
The
receiver will decode the message by the reverse key, post-multiplying by the
inverse of A.
So
the decoding matrix is
The
receiver decodes the coded message as follows:
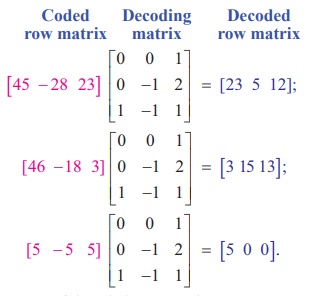
So,
the sequence of decoded row matrices is [23
5 12] , [3 15 13], [5 0 0].
Thus,
the receiver reads the message as “WELCOME”
Elementary Transformations of a
Matrix
A
matrix can be transformed to another matrix by certain operations called
elementary row operations and elementary column
operations.
Elementary row and column operations
Elementary
row (column) operations on a matrix are as follows:
![]() The interchanging of any two
rows (columns) of the matrix
The interchanging of any two
rows (columns) of the matrix
![]() Replacing a row (column) of
the matrix by a non-zero scalar multiple of the row (column) by a non-zero
scalar.
Replacing a row (column) of
the matrix by a non-zero scalar multiple of the row (column) by a non-zero
scalar.
![]() Replacing a row (column) of
the matrix by a sum of the row (column) with a non-zero scalar multiple of
another row (column) of the matrix.
Replacing a row (column) of
the matrix by a sum of the row (column) with a non-zero scalar multiple of
another row (column) of the matrix.
Elementary
row operations and elementary column operations on a matrix are known as
elementary transformations.
We
use the following notations for elementary row transformations:
i. Interchanging of ith and jth rows
is denoted by Ri ↔ Rj .
ii. The multiplication of each
element of ith row by a
non-zero constant λ is denoted by Ri → λ Ri .
iii. Addition to ith row, a non-zero constant λ multiple
of jth row is denoted
by Ri → Ri + λ Rj .
Similar notations are used for elementary column transformations.
Definition 1.4
Two
matrices A and B of same order are said to be
equivalent to one another if one can be obtained from the other by the
applications of elementary transformations. Symbolically, we write A ~ B to
mean that the matrix A is equivalent to the matrix B .
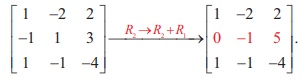
For
instance, let us consider a matrix 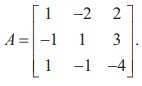
After
performing the elementary row operation R2 → R2 + R1 on A , we get a matrix B in which
the second row is the sum of the second row in A and the first
row in A .
Thus,
we get 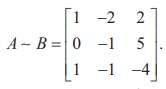
The
above elementary row transformation is also represented as follows:
Note
An
elementary transformation transforms a given matrix into another matrix which
need not be equal
to the given matrix.
Row-Echelon form
Using the row elementary operations, we can transform a given
non-zero matrix to a simplified form called a Row-echelon
form. In a row-echelon form, we may
have rows all of whose entries are zero. Such rows are called zero rows. A non-zero row is one in
which at least one of the entries is not zero. For instance, in the matrix,
 ,
,
R1 and R2 are non-zero rows
and R3 is a zero row
Definition 1.5
A
non-zero matrix E is said to be in a row-echelon form if:
i. All zero rows of E occur below every non-zero
row of E.
ii. The first non-zero element in any row i of E occurs
in the jth column
of E , then all other entries in
the jth column of E below
the first non-zero element of row i are
zeros.
iii. The first non-zero entry in the ith
row of E lies to the left of the first non-zero entry in (i +1)th row of E .
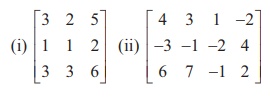
The
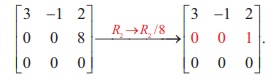
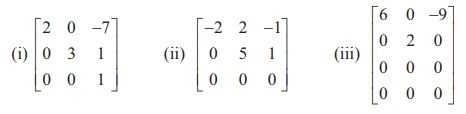
following matrices are in row-echelon form:
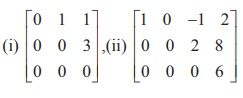
Consider
the matrix in (i). Go up row by row from the last row
of the matrix. The third row is a zero row. The first non-zero entry in the
second row occurs in the third column and it lies to the right of the first
non-zero entry in the first row which occurs in the second column. So the
matrix is in row- echelon form.
Consider
the matrix in (ii). Go up row by row from the last row of the matrix. All the
rows are non-zero rows. The first non-zero entry in the third row occurs in the
fourth column and it occurs to the right of the first non-zero entry in the
second row which occurs in the third column. The first non-zero entry in the
second row occurs in the third column and it occurs to the right of the first
non-zero entry in the first row which occurs in the first column. So the matrix
is in row-echelon form.
The
following matrices are not in row-echelon form:
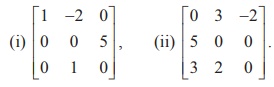
Consider
the matrix in (i). In this matrix, the first non-zero
entry in the third row occurs in the second column and it is on the left of the
first non-zero entry in the second row which occurs in the third column. So the
matrix is not in row-echelon form.
Consider
the matrix in (ii). In this matrix, the first non-zero entry in the second row
occurs in the first column and it is on the left of the first non-zero entry in
the first row which occurs in the second column. So the matrix is not in
row-echelon form.
Method to reduce a matrix [aij]m ×n to a row-echelon form.
Step 1
Inspect
the first row. If the first row is a zero row, then the row is interchanged
with a non-zero row below the first row. If a11 is
not equal to 0, then go to step 2. Otherwise, interchange the first row R1 with
any other row below the first row which has a non-zero element in the first
column; if no row below the first row has non-zero entry in the first column,
then consider a12 .
If a12 is not equal to 0, then go to step 2.
Otherwise, interchange the first row R1 with any
other row below the first row which has a non-zero element in the second
column; if no row below the first row has non-zero entry in the second column,
then consider a13. Proceed in the same way till we get a
non-zero entry in the first row. This is called pivoting and the first non-zero
element in the first row is called the pivot of the first row.
Step 2
Use
the first row and elementary row operations to transform all elements under the
pivot to become zeros.
Step 3
Consider
the next row as first row and perform steps 1 and 2 with the rows below this
row only.
Repeat
the step until all rows are exhausted.
Example 1.13
Reduce
the matrix 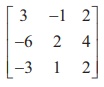 to a row-echelon form.
to a row-echelon form.
Solution

Note
This
is also a row-echelon form of the given matrix.
So,
a row-echelon form of a matrix is not necessarily unique.
Example 1.14
Reduce
the matrix  to a row-echelon form.
to a row-echelon form.
Solution
Rank of a Matrix
To define the rank of a matrix, we have to know about sub-matrices
and minors of a matrix.
Let A be a given matrix. A matrix obtained by
deleting some rows and some columns of A is called a sub-matrix of A. A matrix
is a sub-matrix of itself because it is obtained by leaving zero number of rows
and zero number of columns.
Recall
that the determinant of a square sub-matrix of a matrix is called a minor of
the matrix.
Definition
1.6
The rank of a matrix A is defined as the order of a highest order non-vanishing minor of
the matrix A. It is denoted by the symbol ρ (A). The rank of a zero matrix is defined to be 0.
Note
![]() If a matrix contains
at-least one non-zero element, then ρ ( A) ≥ 1.
If a matrix contains
at-least one non-zero element, then ρ ( A) ≥ 1.
![]() The rank of the identity
matrix In is n.
The rank of the identity
matrix In is n.
![]() If the rank of a
matrix A is r, then there exists at-least one
minor of A of order r which does not vanish
and every minor of A of order r +1
and higher order (if any) vanishes.
If the rank of a
matrix A is r, then there exists at-least one
minor of A of order r which does not vanish
and every minor of A of order r +1
and higher order (if any) vanishes.
![]() If A is
an m × n matrix, then ρ (A) ≤ min{m, n} =
minimum of m, n.
If A is
an m × n matrix, then ρ (A) ≤ min{m, n} =
minimum of m, n.
![]() A square matrix A of
order n has inverse if and only if ρ ( A) = n.
A square matrix A of
order n has inverse if and only if ρ ( A) = n.
Example 1.15
Find
the rank of each of the following matrices:
Solution
(i) Let A = . Then A is a matrix of order 3× 3. So ρ(A)
≤ min {3, 3} = 3. The highest order
of minors of A is 3 . There is only one third order minor of A
.
. Then A is a matrix of order 3× 3. So ρ(A)
≤ min {3, 3} = 3. The highest order
of minors of A is 3 . There is only one third order minor of A
.
It
is = 3 (6− 6) − 2
(6−6) + 5 (3 − 3) = 0. So, ρ(A)
< 3.
Next
consider the second-order minors of A .
We
find that the second order minor  = 3 − 2 = 1 ≠ 0 . So ρ(A) = 2 .
= 3 − 2 = 1 ≠ 0 . So ρ(A) = 2 .
(ii)
Let A = 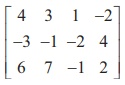 . Then A is a matrix of order 3×4 . So ρ(A) ≤ min {3, 4} = 3.
. Then A is a matrix of order 3×4 . So ρ(A) ≤ min {3, 4} = 3.
The
highest order of minors of A is 3 . We search for a
non-zero third-order minor of A . But
we find that all of them
vanish. In fact, we have

So,
ρ(A) < 3. Next, we search for a
non-zero second-order minor of A .
We
find that  = -4+9 =5 ≠ 0 . So, ρ(A) = 2 .
= -4+9 =5 ≠ 0 . So, ρ(A) = 2 .
Remark
Finding
the rank of a matrix by searching a highest order non-vanishing minor is quite
tedious when the order of the matrix is quite large. There is another easy
method for finding the rank of a matrix even if the order of the matrix is
quite high. This method is by computing the rank of an equivalent row-echelon
form of the matrix. If a matrix is in row-echelon form, then all entries below
the leading diagonal (it is the line joining the positions of the diagonal
elements a11 , a22 , a33 ,.
of the matrix) are zeros. So, checking whether a minor is zero or not, is quite
simple.
Example 1.16
Find
the rank of the following matrices which are in row-echelon form
:
Solution
(i) Let A =  . Then A is a matrix of order 3 3 × and ρ(A)
≤ 3
. Then A is a matrix of order 3 3 × and ρ(A)
≤ 3
The
third order minor |A| = = (2) (3)(
1) = 6 ≠ 0 . So, ρ(A) = 3 .
Note
that there are three non-zero rows.
(ii)
Let A =  . Then A is a matrix of order 3× 3 and ρ(A)
≤ 3.
. Then A is a matrix of order 3× 3 and ρ(A)
≤ 3.
The
only third order minor is |A| = = (-2) (5) (0) = 0 . So ρ(A) ≤ 2 .
There
are several second order minors. We find that there is a second order minor,
for example,  = (-2)(5) = -10 ≠ 0 . So, ρ(A)
= 2.
= (-2)(5) = -10 ≠ 0 . So, ρ(A)
= 2.
Note
that there are two non-zero rows. The third row is a zero row.
(iii)
Let A =  . Then A is a matrix of order 4 × 3 and ρ(A)
≤ 3.
. Then A is a matrix of order 4 × 3 and ρ(A)
≤ 3.
The
last two rows are zero rows. There are several second order minors. We find
that there is a second order minor, for
example,  = (6) (2) = 12 ≠ 0 .
= (6) (2) = 12 ≠ 0 .
So, ρ(A) = 2.
Note
that
there are two non-zero rows. The third and fourth rows are zero rows.
We
observe from the above example that the rank of a matrix in row echelon form is
equal to the number of non-zero rows in it. We
state this observation as a theorem without proof.
Theorem 1.11
The
rank of a matrix in row echelon form is the number of non-zero rows in it.
The rank of a matrix which is not in a row-echelon form, can be
found by applying the following result which is stated without proof.
Theorem 1.12
The
rank of a non-zero matrix is equal to the number of non-zero rows in a
row-echelon form of the matrix.
Example 1.17
Find
the rank of the matrix  by reducing it to a row-echelon form.
by reducing it to a row-echelon form.
Solution
Let
A = . Applying elementary row operations, we get

The
last equivalent matrix is in row-echelon form. It has two non-zero rows. So,
ρ (A)= 2.
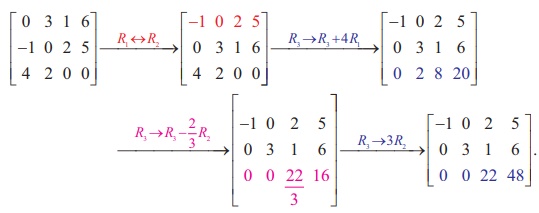
Example 1.18
Find
the rank of the matrix 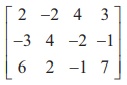 by reducing it to a row-echelon form.
by reducing it to a row-echelon form.
Solution
Let
A be the matrix. Performing elementary row operations, we get
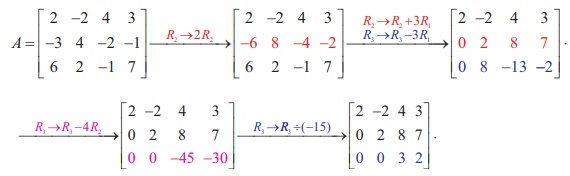
The
last equivalent matrix is in row-echelon form. It has three non-zero rows. So, ρ(A) = 3 .
Elementary
row operations on a matrix can be performed by pre-multiplying the given matrix
by a special class of matrices called elementary matrices.
Definition 1.7
An elementary matrix is
defined as a matrix which is obtained from an identity matrix by applying only
one elementary transformation.
Remark
If
we are dealing with matrices with three rows, then all elementary matrices are
square matrices of order 3 which are obtained by carrying out only one
elementary row operations on the unit matrix I3. Every
elementary row operation that is carried out on a given matrix A can
be obtained by pre-multiplying A with elementary matrix.
Similarly, every elementary column operation that is carried out on a given
matrix A can be obtained by post-multiplying Awith an elementary matrix. In the present chapter,
we use elementary row operations only.
For
instance, let us consider the matrix A = 
Suppose
that we do the transformation R2 →
R2 + λR3 on A, where λ ≠ 0 is a
constant. Then, we get

The
matrix  is an elementary matrix, since we have
is an elementary matrix, since we have 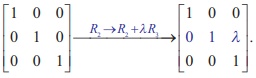
Pre-multiplying
A by , we get

From
(1) and (2), we get 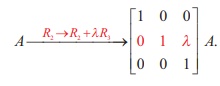
So,
the effect of applying the elementary transformation R2 →
R2 + λR3 on A is the same as that of
pre-multiplying the matrix A with the elementary matrix 
Similarly,
we can show that
(i) the effect of applying the
elementary transformation R2↔ R3 on A is the
same as that of pre-multiplying the matrix A with the elementary
matrix 
(ii)
the effect of applying the elementary transformation R2 →
R2λ on A is the same as that of pre-multiplying the
matrix A with the elementary matrix 
We
state the following result without proof.
Theorem 1.13
Every
non-singular matrix can be transformed to an identity matrix, by a sequence of
elementary row operations.
As
an illustration of the above theorem, let us consider the matrix A = 
Then,
|A| = 12+ 3 = 15 ≠ 0. So, A is
non-singular. Let us transform A into I2 by a sequence of elementary row operations. First, we search for a row
operation to make a11 of A as 1. The elementary row operation
needed for this is R1 → (1/2) R1. The
corresponding elementary matrix is
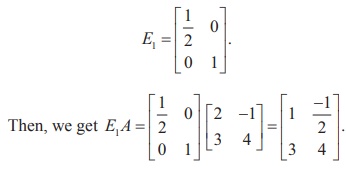
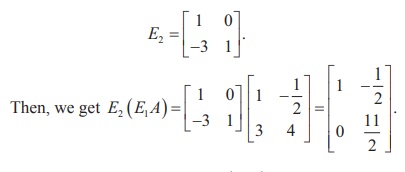
Next,
let us make all elements below a11 of E1A as 0.
There is only one element a21.
The
elementary row operation needed for this is R2
→ R2 + (−3) R1 .
The
corresponding elementary matrix is E2 =
Next,
let us make a22 of E2(E2A)
as 1. The elementary row operation needed for this is 
The
corresponding elementary matrix is E3 = 
Then,
we get E3(E2(E1A))
= 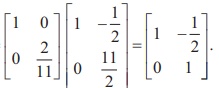
Finally,
let us find an elementary row operation to make a12 of E3(E2(E1A)) as 0. The
elementary row operation needed for this is R1 →
R1 + (1/2) R2. The corresponding elementary matrix
is
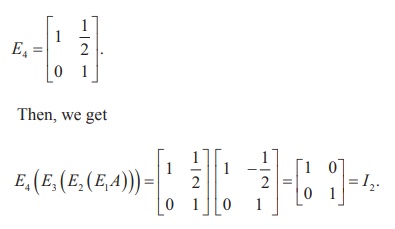
We
write the above sequence of elementary transformations in the following manner:

Example 1.19
Show
that the matrix  is non-singular and reduce it to the identity matrix by
elementary row transformations.
is non-singular and reduce it to the identity matrix by
elementary row transformations.
Solution
Let
A = .Then, |A| = 3 (0+2 ) – 1(2+5) + 4(4-0) =
6-7+16 ≠ 0. So, A is non-singular. Keeping the identity matrix as our
goal, we perform the row operations sequentially on A as follows:
Gauss-Jordan Method
Let A be
a non-singular square matrix of order n .
Let B be the inverse of A.
Then,
we have AB = BA = In . By
the property of In , we
have A = In A = AIn .
Consider
the equation A = In A …………………………………………..(1)
Since A is
non-singular, pre-multiplying by a sequence of elementary matrices (row
operations) on both sides of (1), A on the left-hand-side of
(1) is transformed to the identity matrix In and
the same sequence of elementary matrices (row operations) transforms In of
the right-hand-side of (1) to a matrix B.
So, equation (1) transforms to In = BA.
Hence, the inverse of A is B. That is, A−1 = B.
Note
If E1 , E2 ,…, Ek are elementary matrices
(row operations) such that (Ek … E2 E1 ) A = In ,
then A−1 = Ek … E2 E1.
Transforming
a non-singular matrix A to the form In by
applying elementary row operations, is called Gauss-Jordan
method. The steps in finding A−1 by Gauss-Jordan method are given below:
Step 1
Augment
the identity matrix In on the right-side of A to
get the matrix [ A | In ] .
Step 2
Obtain
elementary matrices (row operations) E1 , E2 ,…, Ek such that (Ek … E2 E1 ) A = In .
Apply E1 , E2 ,…, Ek on [ A | In ] .
Then [(Ek …… E2 E1 ) A | (Ek ….. E2 E1 ) In].
That is, [In | A−1 ].
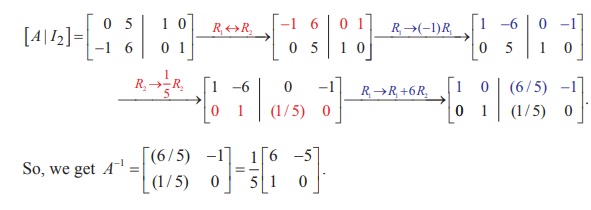
Example 1.20
Find
the inverse of the non-singular matrix A =  , by Gauss-Jordan method.
, by Gauss-Jordan method.
Solution
Applying
Gauss-Jordan method, we get
Example 1.21
Find
the inverse of A =  by Gauss-Jordan method.
by Gauss-Jordan method.
Solution
Applying
Gauss-Jordan method, we get
Applications of Matrices: Solving
System of Linear Equations
One
of the important applications of matrices and determinants is solving of system
of linear equations. Systems of linear equations arise as mathematical models
of several phenomena occurring in biology, chemistry, commerce, economics,
physics and engineering. For instance, analysis of circuit theory, analysis of
input-output models, and analysis of chemical reactions require solutions of
systems of linear equations.
System of Linear Equations in Matrix Form
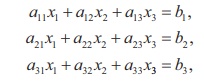
A
system of m linear equations in n unknowns is
of the following form:
a11x1 + a12x2 + a13x3 +
……… + a1nxn + = b1
a21x1 + a22x2 + a23x3 +
……… + a2nxn + = b2
a31x1 + a32x2 + a3x3 +
……… + a3nxn + = b3
…..
…. ….. ….. …..
...
Am1x1 + am2x2 + am3x3 +
……… + amnxn + = bm
where the coefficients aij ,
i = 1, 2, …. , m; j = 1, 2,….., n and bk ,
k = 1, 2,….., m are constants. If all the bk 's
are zeros, then the above system is called a homogeneous
system of linear equations. On the other
hand, if at least one of the bk 's is non-zero, then the above system is called
a non-homogeneous system of linear equations. If there exist values α1 , α2 , ….. , αn for x1, x2 , …. , xn respectively which satisfy
every equation of (1), then the ordered n − tuple (α1 , α2 , …. , αn ) is
called a solution of (1). The above system (1) can be put in a matrix form as
follows:
Let
A =  be the m x n matrix
formed by the coefficients of x1, x2 , x3,….
, xn . The first row of A
is formed by the coefficients of x1, x2 , x3,….
, xn in the same order in
which they occur in the first equation. Likewise, the other rows of A are formed. The first column is formed by the
coefficients of x1 in the m equations
in the same order. The other columns are formed in a similar way.
be the m x n matrix
formed by the coefficients of x1, x2 , x3,….
, xn . The first row of A
is formed by the coefficients of x1, x2 , x3,….
, xn in the same order in
which they occur in the first equation. Likewise, the other rows of A are formed. The first column is formed by the
coefficients of x1 in the m equations
in the same order. The other columns are formed in a similar way.
Let
X = ![]() be the n x1 order column matrix formed by
the unknowns x1, x2 , x3,….
, xn
be the n x1 order column matrix formed by
the unknowns x1, x2 , x3,….
, xn
Let
B = ![]() be the m x 1 order column matrix formed by the right-hand
side constants b1, b2 , b3 ,
…. , bm .
be the m x 1 order column matrix formed by the right-hand
side constants b1, b2 , b3 ,
…. , bm .
Then
we get
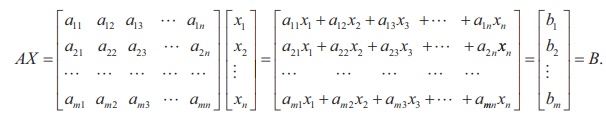
Then
AX = B is a matrix equation involving matrices and it is called the matrix form of the system of
linear equations (1). The matrix A is called the coefficient matrix of the system and the
matrix
is called the augmented matrix of
the system. We denote the augmented matrix by [ A | B
].
As
an example, the matrix form of the system of linear equations
2x
+ 3y - 5z + 7 = 0, 7 y + 2z - 3x = 17, 6x - 3y - 8z + 24 = 0 is 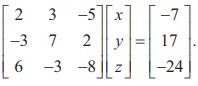
Solution to a System of Linear equations
The
meaning of solution to a system of linear equations can be understood by
considering the following cases :
Case (i)
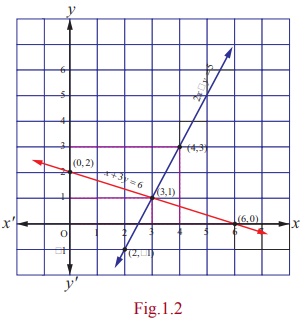
Consider
the system of linear equations
2x
- y = 5 , ...
(1)
x
+ 3y = 6 . ...
(2)
These
two equations represent a pair of straight lines in two dimensional analytical
geometry (see the Fig. 1.2). Using (1), we get
x = [5 + y] / 2
(3)
Substituting
(3) in (2) and simplifying, we get y = 1.
Substituting
y = 1 in (1) and simplifying, we get x = 3 .
Both
equations (1) and (2) are satisfied by x = 3 and y = 1.
That is, a solution of (1) is also a solution of (2).
So, we say that the system is consistent and has unique solution
(3,1) . The point (3,1) is
the point of intersection of the two lines 2x - y =
5 and x + 3y = 6 .
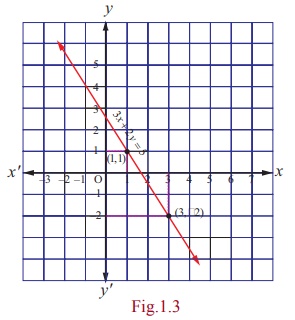
Case (ii)
Consider
the system of linear equations
3x
+ 2 y = 5 , ...
(1)
6x
+ 4 y = 10 ... (2)
Using
equation (1), we get
x
= [5 - 2 y] / 3 ... (3)
Substituting
(3) in (2) and simplifying, we get 0 = 0.
This
informs us that equation (2) is an elementary transformation of equation (1).
In fact, by dividing equation (2) by 2, we get equation (1). It is not possible
to find uniquely x and y with just a single equation (1).
So
we are forced to assume the value of one unknown, say y = t , where t is any real number.
Then,
x = [5 - 2t] /3. The two equations (1) and (2) represent one and only one
straight line (coincident lines) in two dimensional analytical geometry (see
Fig. 1.3) . In other words, the system is consistent
(a solution of (1) is also a solution of (2)) and has infinitely many
solutions, as t can assume any real value.
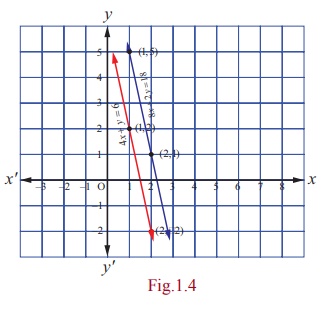
Case (iii)
Consider
the system of linear equations
4x
+ y = 6 , ... (1)
8x
+ 2 y = 18 . ...
(2)
Using
equation (1), we get
x
= [6 – y] / 4 ... (3)
Substituting
(3) in (2) and simplifying, we get 12 = 18 .
This
is a contradicting result, which informs us that equation (2) is inconsistent
with equation (1). So, a solution of (1) is not a solution of (2).
In
other words, the system is inconsistent and has no solution. We note that the
two equations represent two parallel straight lines (non-coincident) in two
dimensional analytical geometry (see Fig. 1.4). We know that two non-coincident
parallel lines never meet in real points.
Note
(1)
Interchanging any two equations of a system of linear equations does not alter
the solution of the system.
(2)
Replacing an equation of a system of linear equations by a non-zero constant
multiple of itself does not alter the solution of the system.
(3)
Replacing an equation of a system of linear equations by addition of itself
with a non-zero multiple of any other equation of the system does not alter the
solution of the system.
Matrix Inversion Method
This
method can be applied only when the coefficient matrix is a square matrix and
non-singular.
Consider
the matrix equation
AX = B , … (1)
where A is a
square matrix and non-singular. Since A is non-singular, A−1 exists and A−1 A = AA−1 = I.
Pre-multiplying both sides of (1) by A−1, we get A−1 ( AX ) = A−1B. That is, ( A−1 A) X = A−1B. Hence, we get X = A−1B.
Example 1.22
Solve
the following system of linear equations, using matrix inversion method:
5x + 2 y = 3,
3x + 2 y = 5
.
Solution
The
matrix form of the system is AX = B , where 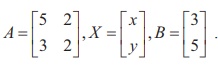
We
find |A| =  = 10 - 6= 4 ≠ 0. So, A−1 exists and A−1 =
= 10 - 6= 4 ≠ 0. So, A−1 exists and A−1 = 
Then,
applying the formula X = A−1B , we get
So
the solution is (x = −1, y = 4).
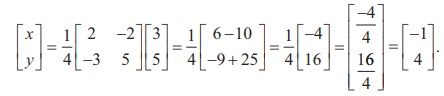
Example 1.23
Solve
the following system of equations, using matrix inversion method:
2x1 +
3x2 + 3x3 = 5,
x1 – 2x2 + x3 =
-4,
3x1 –
x2 – 2x3 = 3
Solution
The
matrix form of the system is AX = B,where
So,
the solution is ( x1 =
1, x2 = 2, x3 =
−1) .
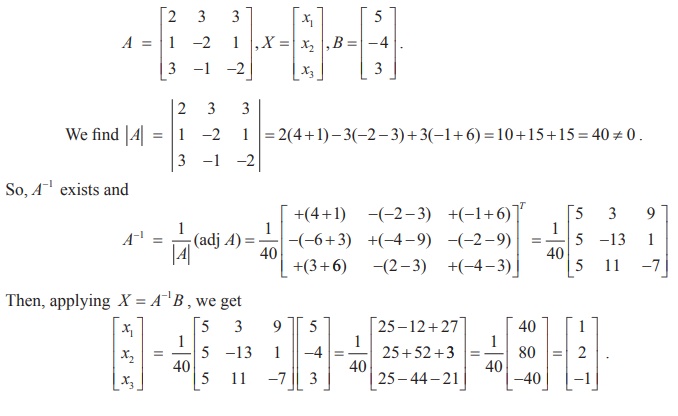
Example 1.24
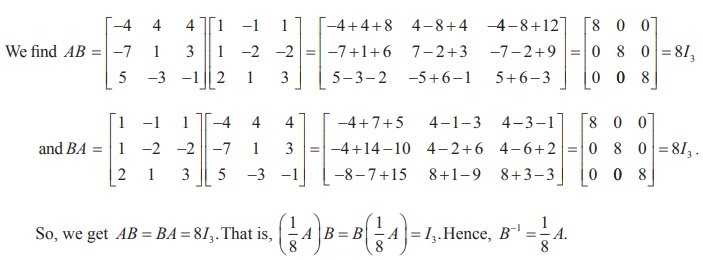
If 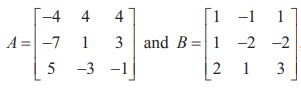 , find the products AB and BA and hence solve the system of
equations x − y + z = 4, x – 2y – 2z = 9, 2x + y +3z =1.
, find the products AB and BA and hence solve the system of
equations x − y + z = 4, x – 2y – 2z = 9, 2x + y +3z =1.
Solution
Writing
the given system of equations in matrix form, we get
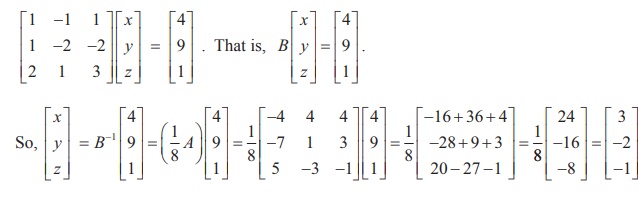
Hence,
the solution is (x = 3, y = - 2, z =
−1).
CRAMER’S RULE
This
rule can be applied only when the coefficient matrix is a square matrix and
non-singular. It is explained by
considering the following system of equations:
where the coefficient
matrix 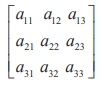 is non-singular. Then
is non-singular. Then 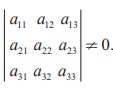
Let
us put Δ =  . Then, we have
. Then, we have
Note
Replacing the first column
elements a11 , a21 , a31 of Δ with b1 , b2 , b3 respectively,
we get Δ1. Replacing the second column elements a12 , a22 , a32 of Δ with b1 , b2 , b3 respectively,
we get Δ2 . Replacing the third column elements a13 , a23 , a33 of Δ with b1 , b2 , b3 respectively,
we get Δ3.
If Δ = 0,
Cramer’s rule cannot be applied.
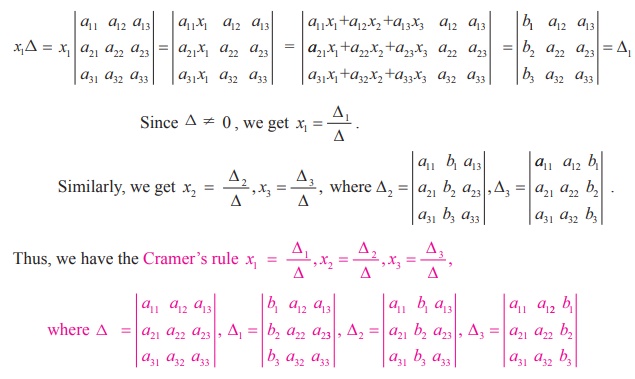
Example 1.25
Solve,
by Cramer’s rule, the system of equations
x1 − x2 = 3, 2x1 + 3x2 + 4x3 = 17, x2 + 2x3 = 7.
Solution
First
we evaluate the determinants
So,
the solution is (x1 =
2, x2 = - 1, x3 =
4).
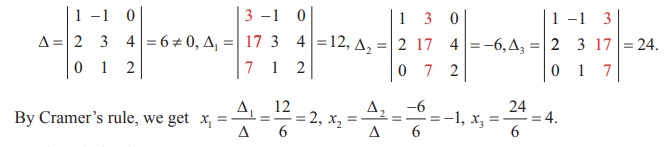
Example 1.26
In a T20 match, Chennai
Super Kings needed just 6 runs to win with 1 ball left to go in the last over.
The last ball was bowled and the batsman at the crease hit it high up. The ball
traversed along a path in a vertical plane and the equation of the path
is y = ax2 + bx + c with
respect to a xy -coordinate
system in the vertical plane and the ball
traversed through the points
(10,8), (20,16), (30,18) , can you conclude that Chennai Super Kings won
the match?
Justify
your answer. (All distances are measured in metres
and the meeting point of the plane of the path with the farthest boundary
line is (70, 0).)
Solution
The path y = ax2 + bx + c passes
through the points (10,8), (20,16), (40, 22) . So, we get the system of equations 100a + 10b + c = 8, 400a + 20b + c = 16,1600a + 40b + c = 22. To apply Cramer’s rule, we find
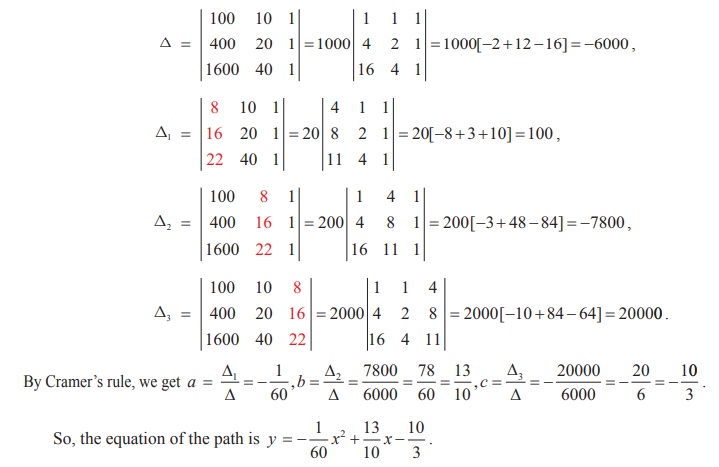
When x =
70, we get y = 6. So, the ball went by 6 metres
high over the boundary line and it is impossible for a fielder standing even just before the boundary line to jump and catch the ball. Hence the ball went for a super six
and the Chennai Super Kings won the match.
Gaussian Elimination Method
This
method can be applied even if the coefficient matrix is singular matrix and
rectangular matrix. It is essentially the method of substitution which we have
already seen. In this method, we transform the augmented matrix of the system
of linear equations into row-echelon form and then by back-substitution, we get
the solution.
Example 1.27
Solve
the following system of linear equations, by Gaussian elimination method :
4x + 3y + 6z = 25, x + 5 y + 7z = 13,
2x + 9 y + z = 1.
Solution
Transforming
the augmented matrix to echelon form, we get
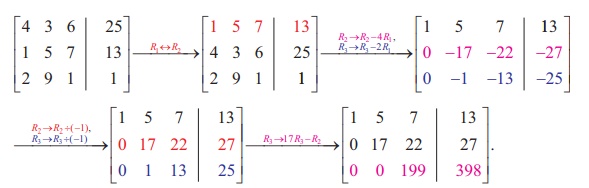
The
equivalent system is written by using the echelon form:
x
+ 5y + 7z = 13 , … (1)
17y
+ 22z = 27 , … (2)
199z
= 398 . … (3)
Substituting
z = 2, y = -1 in (1), we get x = 13 - 5 ×
(−1 ) − 7 × 2 = 4 .
So,
the solution is ( x =4, y = - 1, z = 2 ).
Note. The above method of going
from the last equation to the first equation is called the method of
back substitution.
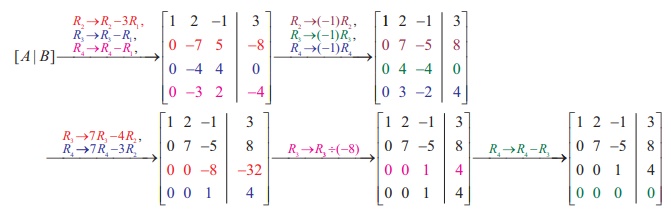
Example 1.28
The upward speed v(t)
of a rocket at time t is approximated by v(t) = at2 + bt + c, 0 ≤ t ≤ 100 where a, b, and c are
constants. It has been found that the speed at times t = 3, t = 6 , and t = 9 seconds are respectively, 64, 133, and 208
miles per second respectively. Find the speed at time t
= 15 seconds. (Use Gaussian elimination method.)
Solution
Since v(3) =64, v(6) = 133 and v(9)
= 208 , we get the following system of linear equations
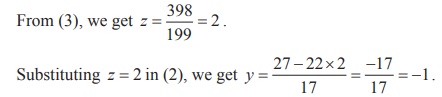
9a
+3b + c = 64 ,
36a
+ 6b + c = 133,
81a
+ 9b + c = 208 .
We
solve the above system of linear equations by Gaussian elimination method.
Reducing
the augmented matrix to an equivalent row-echelon form by using elementary row operations, we get
Writing
the equivalent equations from the row-echelon matrix, we get
9a
+ 3b + c = 64, 2b + c = 41, c= 1.
By
back substitution, we get

So,
we get v (t) = 1/3 t2 +
20t + 1.
Hence, v(15) = 1/3 (225) + 20(15) + 1 = 75 + 300 + 1 = 376
Solution To A System Of Linear
Equations
Example 1.22
Solve
the following system of linear equations, using matrix inversion method:
5x + 2 y = 3,
3x + 2 y = 5
.
Solution
The
matrix form of the system is AX = B , where
We
find |A| = = 10 - 6= 4 ≠ 0. So, A−1 exists
and A−1 =
Then,
applying the formula X = A−1B , we get
So
the solution is (x = −1, y = 4).
Example 1.23
Solve
the following system of equations, using matrix inversion method:
2x1 +
3x2 + 3x3 = 5,
x1 –
2x2 + x3 = -4,
3x1 –
x2 – 2x3 = 3
Solution
The
matrix form of the system is AX = B,where
So,
the solution is ( x1 = 1, x2 =
2, x3 = −1) .
Example 1.24
If , find the products AB and BA and hence solve the system of
equations x − y + z = 4, x – 2y – 2z = 9, 2x + y +3z =1.
Solution
Writing
the given system of equations in matrix form, we get
Hence,
the solution is (x = 3, y = - 2, z =
−1).
(Ii) Cramer’s Rule
Example 1.25
Solve,
by Cramer’s rule, the system of equations
x1 − x2 = 3,
2x1 + 3x2 + 4x3 = 17, x2 + 2x3 = 7.
Solution
First
we evaluate the determinants
So,
the solution is (x1 = 2, x2 =
- 1, x3 = 4).
Example 1.26
In a T20 match, Chennai
Super Kings needed just 6 runs to win with 1 ball left to go in the last over.
The last ball was bowled and the batsman at the crease hit it high up. The ball
traversed along a path in a vertical plane and the equation of the path
is y = ax2 + bx + c with
respect to a xy -coordinate
system in the vertical plane and the ball
traversed through the points
(10,8), (20,16), (30,18) , can you conclude that Chennai Super Kings won
the match
Justify
your answer. (All distances are measured in metres
and the meeting point of the plane of the path with the farthest boundary
line is (70, 0).)
Solution
The path y = ax2 + bx + c passes
through the points (10,8), (20,16), (40, 22) . So, we get the system of equations 100a + 10b + c = 8, 400a + 20b + c= 16,1600a + 40b + c = 22. To apply Cramer’s rule, we find
When x =
70, we get y = 6.
So, the ball went by 6 metres high over the boundary line and it is impossible for
a fielder standing even just before theboundary
line to jump and catch the ball.
Hence the ball went for a
super six and the Chennai Super Kings won the match.
(iii) Gaussian Elimination Method
Example 1.27
Solve
the following system of linear equations, by Gaussian elimination method :
4x + 3y + 6z = 25, x + 5 y + 7z = 13,
2x + 9 y + z = 1.
Solution
Transforming
the augmented matrix to echelon form, we get
The
equivalent system is written by using the echelon form:
x
+ 5y + 7z = 13 , … (1)
17y
+ 22z = 27 , … (2)
199z
= 398 . … (3)
Substituting
z = 2, y = -1 in (1), we get x = 13 - 5 ×
(−1 ) − 7 × 2 = 4 .
So,
the solution is ( x =4, y = - 1, z = 2 ).
Note. The above method of going
from the last equation to the first equation is called the method of
back substitution.
Example 1.28
The upward speed v(t)
of a rocket at time t is approximated by v(t) = at2 + bt + c, 0 ≤ t ≤ 100 where a, b, and c are
constants. It has been found that the speed at times t = 3, t = 6 , and t = 9 seconds are respectively, 64, 133, and 208
miles per second respectively. Find the speed at time t
= 15 seconds. (Use Gaussian elimination method.)
Solution
Since v(3) =64, v(6) = 133 and v(9)
= 208 , we get the following system of linear equations
9a
+3b + c = 64 ,
36a
+ 6b + c = 133,
81a
+ 9b + c = 208 .
We
solve the above system of linear equations by Gaussian elimination method.
Reducing
the augmented matrix to an equivalent row-echelon form by using elementary row operations, we get
Writing
the equivalent equations from the row-echelon matrix, we get
9a
+ 3b + c = 64, 2b + c = 41, c= 1.
By
back substitution, we get
So,
we get v (t) = 1/3 t2 + 20t + 1.
Hence, v(15) = 1/3 (225) + 20(15) + 1 = 75 + 300 + 1 = 376
Applications
Of Matrices: Consistency Of System Of Linear Equations
By Rank Method
In second previous section, we have already defined consistency of
a system of linear equation. In this section,
we investigate it by using rank method. We state the following theorem without
proof:
Theorem 1.14 (Rouché - Capelli
Theorem)
A
system of linear equations, written in the matrix form as AX = B,
is consistent if and only if the rank of the coefficient matrix is equal to the
rank of the augmented matrix; that is, ρ ( A) = ρ ([ A | B]).
We
apply the theorem in the following examples.
Non-homogeneous Linear Equations
Example 1.29
Test
for consistency of the following system of linear equations and if possible
solve:
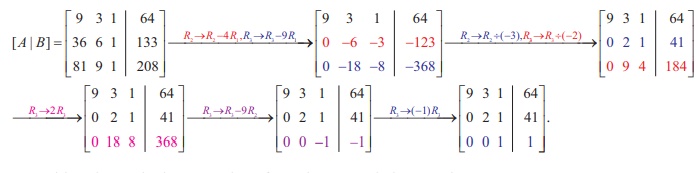
x + 2 y − z =
3, 3x − y + 2z = 1, x −
2 y + 3z = 3, x − y + z +1
= 0 .
Solution
Here
the number of unknowns is 3.
The
matrix form of the system is AX = B, where
Applying
Gaussian elimination method on [ A | B], we get
There
are three non-zero rows in the row-echelon form of [A | B].So, ρ ([A | B] ) . = 3
So,
the row-echelon form of A is 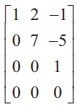 . There are three non-zero rows in it. So ρ(A)
= 3.
. There are three non-zero rows in it. So ρ(A)
= 3.
Hence,
ρ(A) = ρ([ A | B ]) = 3.
From
the echelon form, we write the equivalent system of equations
x
+ 2y –z =3, 7y-5z = 8, z=4, 0=0.
The
last equation 0 = 0 is meaningful. By the method of back substitution, we get
z
= 4
7y
- 20 = 8 ⇒ y = 4 ,
x
= 3 - 8 + 4 ⇒ x = −1.
So,
the solution is (x = −1, y = 4, z = 4)
.(Note that A is not a square matrix.)
Here
the given system is consistent and the solution is unique.
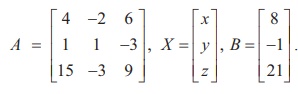
Example 1.30
Test
for consistency of the following system of linear equations and if possible
solve:
4x −
2 y + 6z = 8, x + y −
3z = −1, 15x − 3y + 9z =
21.
Solution
Here the number of unknowns is 3.
The
matrix form of the system is AX = B, where
Applying
elementary row operations on the augmented matrix[ A | B],
we get
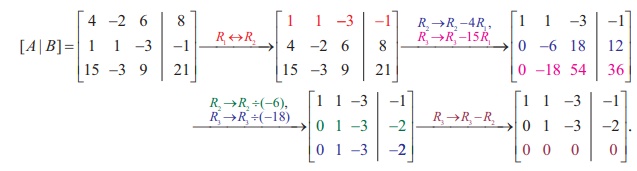
So, ρ ( A)
= ρ ([ A | B]) = 2 < 3.
From the echelon form, we get the equivalent equations
x + y - 3z =
-1, y - 3z = -2 , 0 = 0 .
The equivalent system has two non-trivial equations and three unknowns. So, one of the unknowns should be fixed at our
choice in order to get two equations for the other two unknowns. We fix z arbitrarily
as a real number t , and
we get y = 3t -
2, x = -1- (3t - 2) + 3t = 1. So, the solution is ( x =1, y = 3t - 2, z = t ), where t is real . The above solution set is a one-parameter family of solutions.
Here, the given system is consistent and has infinitely many solutions which form a one parameter
family of solutions.
Note
In the above example, the square matrix A is singular and so matrix inversion method cannot be applied to solve the system of equations. However,Gaussian elimination method is applicable and we
are able to decide whether the system is consistent or not. The next example
also confirms the supremacy of Gaussian elimination method over other methods.
Example 1.31
Test
for consistency of the following system of linear equations and if possible
solve:
x − y + z = −9, 2x −
2 y + 2z = −18, 3x − 3y +
3z + 27 = 0.
Solution
Here the number of unknowns is 3.
The
matrix form of the system is AX = B, where
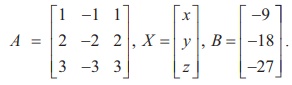
Applying
elementary row operations on the augmented matrix[ A | B],
we get
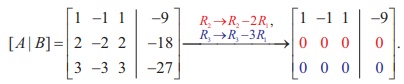
So, ρ ( A) = ρ ([ A | B])
= 1 < 3.
From the echelon form, we get the equivalent equations x - y + z = -9, 0 = 0, 0 = 0.
The equivalent system has one non-trivial equation and three unknowns.
Taking y = s, z = t arbitrarily, we get x - s + t = -9; or x = -9 + s - t.
So,
the solution is ( x =
-9 + s - t, y = s, z = t ), where s and t are
parameters.
The above solution set is a two-parameter family of solutions.
Here,
the given system of equations is consistent and has infinitely many solutions
which form a two parameter family of solutions.
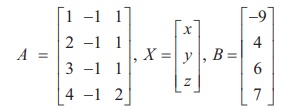
Example 1.32
Test
the consistency of the following system of linear equations
x − y + z = −9, 2x − y + z =
4, 3x − y + z = 6, 4x − y +
2z = 7.
Solution
Here the number of unknowns is 3.
The matrix form of the system of equations is AX = B,
where
Applying elementary row operations on the augmented matrix
[A|B], we get
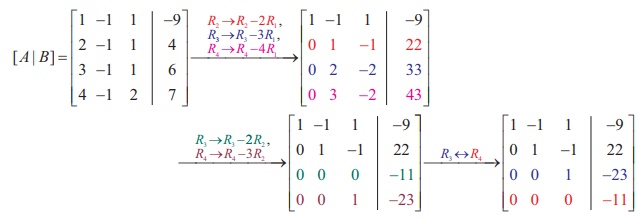
So, ρ (A) = 3 and ρ ([ A |
B]) = 4. Hence ρ ( A) ≠ ρ ([ A | B]).
If we write the equivalent system of equations using the echelon
form, we get
x - y + z = -9, y - z = 22, z = -23, 0 = -11.
The last equation is a contradiction.
So the given system of equations is inconsistent and has no solution.
By Rouché - Capelli theorem, we have the following rule:
Example 1.33
Find
the condition on a, b and c so that the following system of linear equations
has one parameter family of solutions: x + y + z = a, x + 2 y + 3z = b, 3x + 5
y + 7z = c.
Solution
Here
the number of unknowns is 3.
The
matrix form of the system is AX = B, where A = 
Applying
elementary row operations on the augmented matrix [ A | B],
we get
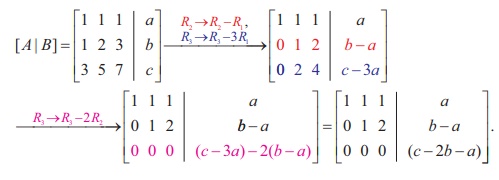
In order that the system should have one parameter family of
solutions, we must have ρ ( A)
= ρ ([ A, B]) = 2. So, the third
row in the echelon form should be a zero row.
So, c -
2b - a = 0 ⇒ c = a +
2b.
Example 1.34
Investigate
for what values of λ and μ the
system of linear equations
x + 2 y + z =
7, x + y + λ z = μ, x +
3y − 5z = 5 has
(i) no solution (ii) a unique
solution (iii) an infinite number of solutions.
Solution
Here the number of unknowns is 3.
The
matrix form of the system is AX = B, where A = 
Applying
elementary row operations on the augmented matrix [ A | B],
we get
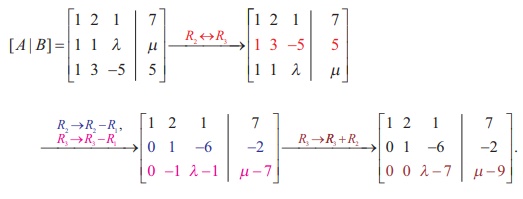
(i) If λ = 7 and μ
≠ 9 , then ρ (A) = 2 and ρ ([ A | B]) = 3. So ρ ( A) ≠ ρ ([ A | B]). Hence the given system is
inconsistent and has no solution.
(ii)
If λ ≠ 7 and m is any real number,
then ρ (A) = 3 and ρ ([ A | B]) = 3.
So
ρ (A) = ρ ([ A | B]) = 3 = Number of
unknowns. Hence the given system is consistent and has a unique solution.
(iii)
If λ = 7 and μ = 9, then ρ(A) = 2
and ρ ([ A | B]) = 2.
So,
ρ(A) = ρ ([ A | B]) = 2 < Number of
unknowns. Hence the given system is consistent and has infinite number of solutions.