GEOMETRY
Types of symmetry
i.
Line of Symmetry
Look at the Fig. 4.1
given on the below.
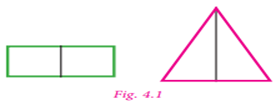
In each figure a line
divides the figure into two identical halves. Such figures are symmetrical
about the line. The line that divides any figure into two equal halves such
that each half exactly coincides with the other is known as the line of
symmetry or axis of symmetry.
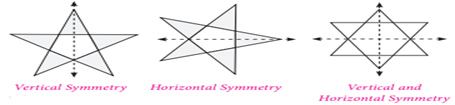
A figure may have one,
two, three or more lines of symmetry. Some figures which has lines of symmetry
are shown in Fig. below

ii.
Reflectional symmetry
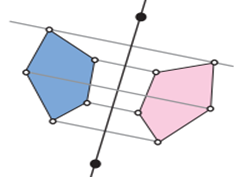
When an object is seen
in a mirror, the image obtained on the other side of the mirror is called its reflection.
An object and its mirror
image are perfectly identical to each other. The left and right sides of an
object appear inverted in the mirror. The object and its reflection image show
mirror symmetry. The mirror line here is the line of symmetry. Mirror symmetry
is called reflectional symmetry.
The following shapes are
examples of reflectional symmetry.
iii.
Rotational Symmetry
An object is said to
have a rotational symmetry if it looks the same after being rotated about its
centre through an angle less than 360°.
When an object rotates
around a fixed axis if its appearance of size and shape does not change then
the object is supposed to be rotationally
symmetrical.
Rotational symmetry can
be observed in the following Fig
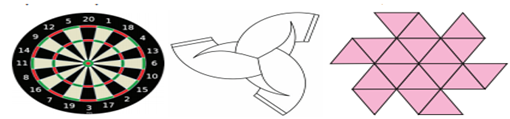
The minimum angle of
rotation of a figure to get exactly the same figure as original is called the angle of rotation.
The total number of
times a figure coincides with itself in one complete rotation is called the
order of rotational symmetry. We can
only rotate the figure up to 360 degrees.

iv.
Translational Symmetry
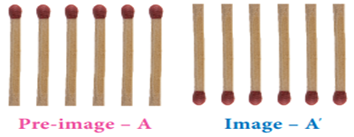
An image has
translational Symmetry if it can be divided by straight lines into a sequence
of identical figures. Translational symmetry results from moving a figure to a
certain distance in a certain direction.
Thus, translation
symmetry occurs when a pattern slides to a new position. The sliding movement
involves neither rotation nor reflection.
1.Introduction
Symmetry is a
fundamental part of geometry, nature, and shapes. It creates patterns that help
us to recognize the beauty of the nature. An object exhibits symmetry if it
looks the same after a transformation, such as reflection or rotation.
Rotation, translation,
reflection concepts within geometrical transformations are used in daily life,
architectural designs, art and technology. Above all an aesthetic sense of
beauty is observed in objects due to symmetry. Let us see the three types of
transformation namely translation, reflection and rotation in this chapter.
2.Symmetry through transformations
Transformation describe
how geometric figures of the same shape are related to one another. Figures or
shapes in a plane can be translated, reflected or rotated to get new figures.
The original figure is
called the pre-image and the new figure is called the image. Pre-images are
denoted by A, B, C … etc., and the images are denoted by A', B', C', … etc. A' can be read as A prime.
The operation that maps
or moves the pre-image onto the image is called the transformation.
A transformation is a specific set of rules that change the pre-image
onto the image.
In this chapter we are going to learn three
types of transformation.
2.1. Translation:
A translation is a transformation
that moves all points of a figure in the same distance in the same direction.
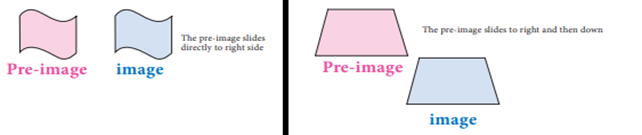
From these examples we
can observe that all points of a figure move in the same distance and in the
same direction.
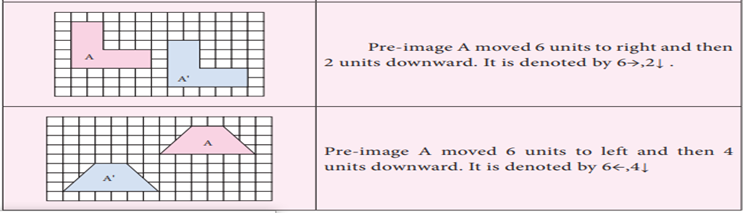
Using a grid paper, we
can specify a translation by how far the shape is moved horizontally and then
vertically.
In horizontal, the right side movement is
denoted by → and the left side movement is denoted ←.
In vertical, the upside movement is denoted
↑ and the downward movement is denoted ↓.
Example 1 Find the new
position of each point using the translation given.
(i). 4 → 2 ↓
(ii). 6 ← 5 ↓ (iii).
6 → 4 ↑ (iv). 4 ← 4 ↓
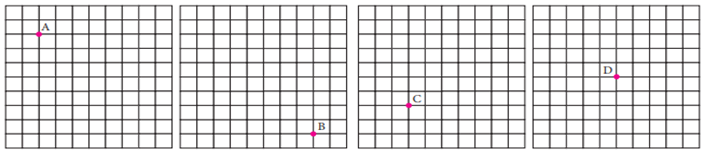
Solution

2.2. Reflection
A reflection is a
transformation that “flips” or “reflects” a figure about a line.
After a figure is
reflected, it looks like a mirror image of itself. The line that a figure is
flipped over is called a line of
reflection.
Observe the following
pictures.
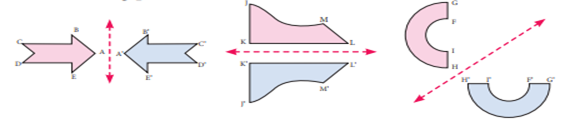
In the above pictures
(Fig), the figures are reflected by a line. This line is called a line of
reflection. Here the red line is the line of reflection.
We can observe that the
figures and its reflections are exactly the same distance from the line of
reflection on both sides. The line of reflection may be horizontal or vertical
or slanting and also it may be on the shape or outside the shape.
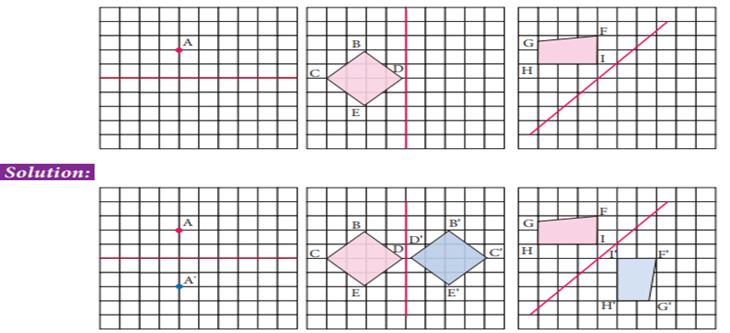
How to reflect a shape about a line?
To reflect the shape
about the line of reflection, we have to reflect every vertex individually and
then connect them again.
First, choose one of the
vertices and draw the line through this vertex so that it is perpendicular to
the line of reflection.
Now measure the distance
from the vertex to the line of the reflection, and mark a point that has the
same distance on the other side. It can be done by using either a ruler or a
compass. Repeat the process for all the other vertices of the shape.
Finally connect all the
reflected vertices in the correct order to get the reflection of the shape.
Example
2 Reflect the shape in each of the following
pictures with given line of reflection.
2.3. Rotation
A rotation is a transformation that turns every point of the
pre-image through a specified angle and direction about a point.
The fixed point is
called the centre of rotation. The angle is called the angle of rotation. A rotation is also called a turn.
The default direction of
a rotation is the anti-clockwise direction. The angle of rotation can be any
value between 0 and 360 degrees, both are included.
Rotation of 360° is
called a full turn, rotation of 180° is called a half turn, rotation of 90° is
called a quarter turn.
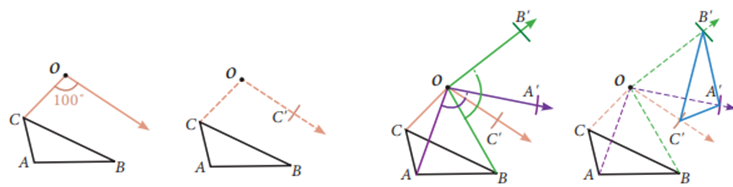
To
rotate a shape about a point with the given angle, we have to rotate every
vertex individually and connect them again. Here ΔABC is rotated about O
with angle of 100°.
Step1. Draw CO. Make angle of 100°
with vertex C and side CO using a protractor.
Step2. Use a compass to construct
CO’ = CO
Step3. Locate A’ and B’ in the
similar way.
Step4. Join A’, B’, C’ to form
ΔA’B’C’
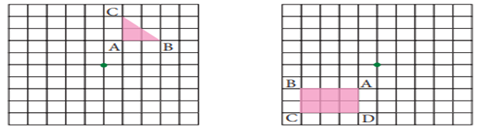
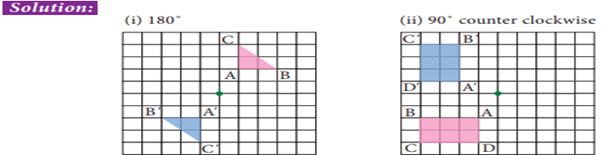
Example 3 Rotate the
pink shape about the green point by given angle of rotation and direction
(i) 180˚ (ii) 90˚ counter clockwise
Example
4 Describe the transformation involved in the
following pair of figures. Write translation, reflection or rotation.

Solution:
(i)
Reflection (ii) Rotation (iii) Translation
3 Construction of circles and concentric circles
3.1 circles
The collection of all
the points in a plane, which are at a fixed distance from a fixed point in the
plane, is called a circle.
The fixed point is
called the centre of the circle and the fixed distance is called the radius of
the circle. The word radius is used in two senses – in the sense of a line
segment which joins the centre of the circle and a point on the circle and in
the sense of length of the line segment.
A circle groups all
points in the plane on which it lies into three categories. They are:
(i)
the points which are inside the
circle, which is also called the interior of the circle;
(ii)
the points on the circle and
(iii)
the
points outside the circle, which is also called the exterior of the circle.
If two points on a circle are joined by a line
segment, then the line segment is called a chord of the circle.The
chord, which passes through the centre of the circle, is called a diameter of
the circle.

3.2 Construction of circles
Now let us learn to construct circle with given
radius and diameter.
 Example
Construct a circle of radius 5 cm with centre O.
Example
Construct a circle of radius 5 cm with centre O.
![]() Step 1:
Mark a point O on the paper. 5cm
Step 1:
Mark a point O on the paper. 5cm
Step 2: Extend the compass distance
equal to the radius 5 cm O A
Step
3:
At center O, Hold the compass firmly and place
the pointed end
of the compass.
Step 4: Slowly rotate the compass
around to get the circle.
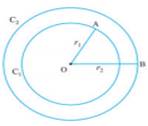
3.3 The Concentric Circles
Circles drawn in a plane
with a common centre and different radii are called concentric circles .
The area between the two
concentric circles is known as circular ring.
Width of the circular
ring (see below Fig.) = OB – OA= r2 – r1.
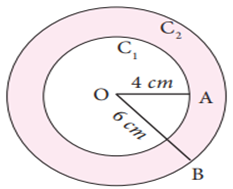
3.4 Construction of Concentric Circles
Example Draw concentric circles with radii 4 cm
and 6 cm and shade the circular ring. Find its width.
Step 1: Draw a rough
diagram and mark the given measurements.
Step 2: Take any point O
and mark it as the centre.
Step 3: With O as centre
and draw a circle of radius OA = 4 cm
Step 4: With O as centre
and draw a circle of radius OB = 6 cm.
Thus the concentric
circles C1 and C2 are drawn.
Width of the circular
ring = OB – OA = 6 – 4 = 2 cm.
Summary
Ø A
transformation is a specific set of rules that change the preimage
onto the image.
Ø A
translation is a transformation that moves all points of a figure in the same
distance in the same direction.
Ø In
horizontal, the right-side movement is denoted by → and the left side
movement is denoted by ←.
Ø In
vertical, the upside movement is denoted by ↑ and the downward movement
is denoted by ↓.
Ø A
reflection is a transformation that “flips” or “reflects” a figure about a
line.
Ø A
rotation is a transformation that turns every point of the pre-image through a
specified angle and direction about a point. The fixed point is called the
centre of rotation. The angle is called the angle of rotation.
Ø A
rotation is also called a turn.
Ø The
default direction of a rotation is the anti-clockwise direction.
Ø Rotation
of 360° is called a full turn, rotation of 180° is called a half turn, rotation
of 90° is called a quarter turn.
Ø The
collection of all the points in a plane, which are at a fixed distance from a
fixed point in the plane, is called a circle. The fixed point is called the
centre of the circle and the fixed distance is called the radius of the circle.
Ø If
two points on a circle are joined by a line segment, then the line segment is called
a chord of the circle.
Ø The
chord, which passes through the centre of the circle, is called a diameter of
the circle.
Ø Circles
drawn in a plane with a common centre and different radii are called concentric
circles.
Ø The
area between the two concentric circles is known as circular ring
Ø Width
of the circular ring(w) = r2 – r1